import gym
import matplotlib
import numpy as np
import sys
from collections import defaultdict
import pprint as pp
from matplotlib import pyplot as plt
%matplotlib inline1. Introduction
In a Markov Decision Process (Figure 1) the agent and environment interacts continuously.

More details are available in Reinforcement Learning: An Introduction by Sutton and Barto.
The dynamics of the MDP is given by \[ \begin{aligned} p(s',r|s,a) &= Pr\{ S_{t+1}=s',R_{t+1}=r | S_t=s,A_t=a \} \\ \end{aligned} \]
The policy of an agent is a mapping from the current state of the environment to an action that the agent needs to take in this state. Formally, a policy is given by \[ \begin{aligned} \pi(a|s) &= Pr\{A_t=a|S_t=s\} \end{aligned} \]
The discounted return is given by \[ \begin{aligned} G_t &= R_{t+1} + \gamma R_{t+2} + \gamma ^2 R_{t+3} + ... + R_T \\ &= \sum_{k=0}^\infty \gamma ^k R_{t+1+k} \end{aligned} \] where \(\gamma\) is the discount factor and \(R\) is the reward.
Most reinforcement learning algorithms involve the estimation of value functions - in our present case, the state-value function. The state-value function maps each state to a measure of “how good it is to be in that state” in terms of expected rewards. Formally, the state-value function, under policy \(\pi\) is given by \[ \begin{aligned} v_\pi(s) &= \mathbb{E}_\pi[G_t|S_t=s] \end{aligned} \]
The Monte Carlo algorithm discussed in this post will numerically estimate \(v_\pi(s)\).
2. Environment
The environment is the game of Blackjack. The player tries to get cards whose sum is as great as possible without exceeding 21. Face cards count as 10. An ace can be taken either as a 1 or an 11. Two cards are dealth to both dealer and player. One of the dealer’s cards is face up (other is face down). The player can request additional cards, one by one (called hits) until the player stops (called sticks) or goes above 21 (goes bust and loses). When the players sticks it becomes the dealer’s turn which uses a fixed strategy: sticks when the sum is 17 or greater and hits otherwise. If the dealer goes bust the player wins, otherwise the winner is determined by whose sum is closer to 21.
We formulate this game as an episodic finite MDP. Each game is an episode.
- States are based on the player’s
- current sum (12-21)
- player will automatically keep on getting cards until the sum is at least 12 (this is a rule and the player does not have a choice in this matter)
- dealer’s face up card (ace-10)
- whether player holds usable ace (True or False)
- current sum (12-21)
This gives a total of 200 states: \(10 × 10 \times 2 = 200\)
- Rewards:
- +1 for winning
- -1 for losing
- 0 for drawing
- Reward for stick:
- +1 if sum > sum of dealer
- 0 if sum = sum of dealer
- -1 if sum < sum of dealer
- Reward for hit:
- -1 if sum > 21
- 0 otherwise
The environment is implemented using the OpenAI Gym library.
3. Agent
The agent is the player. After observing the state of the environment, the agent can take one of two possible actions:
- stick (0) [stop receiving cards]
- hit (1) [have another card]
The agent’s policy will be deterministic - will always stick of the sum is 20 or 21, and hit otherwise. We call this policy1 in the code.
4. Monte Carlo Estimation of the Action-value Function, \(q_\pi(s,a)\)
We will now proceed to estimate the action-value function for the given policy \(\pi\). We can take \(\gamma=1\) as the sum will remain finite:
\[ \large \begin{aligned} q_\pi(s,a) &= \mathbb{E}_\pi[G_t | S_t=s, A_t=a] \\ &= \mathbb{E}_\pi[R_{t+1} + \gamma R_{t+2} + \gamma ^2 R_{t+3} + ... + R_T | S_t=s, A_t=a] \\ &= \mathbb{E}_\pi[R_{t+1} + R_{t+2} + R_{t+3} + ... + R_T | S_t=s, A_t=a] \end{aligned} \]
In numeric terms this means that, given a state and an action, we take the sum of all rewards from that state onwards (following policy \(\pi\)) until the game ends, and take the average of all such sequences.
4.1 Off-policy Estimation via Importance Sampling
On-policy methods, used so far in this series, represents a compromise. They learn action values not for the optimal policy but for a near-optimal policy that can still explore. The off-policy methods, on the other hand, make use of two policies - one that is being optimized (called the target policy) and another one (the behavior policy) that is used for exploratory purposes.
An important concept used by off-policy methods is importance sampling. This is a general technique for extimating expected values under one distribution by using samples from another. This allows us to weight returns according to the relative probability of a trajectory occurring under the target and behavior policies. This relative probability is called the importance-sampling ratio
\[ \large \rho_{t:T-1}=\frac{\prod_{k=t}^{T-1} \pi(A_k|S_k) p(S_{k+1}|S_k,A_k)}{\prod_{k=t}^{T-1} b(A_k|S_k) p(S_{k+1}|S_k,A_k)}=∏_{k=t}^{T-1} \frac{\pi(A_k|S_k)}{b(A_k|S_k)} \]
where \(\pi\) is the target policy, and \(b\) is the behavior policy.
In oder to estimate \(q_{\pi}(s,a)\) we need to estimate expected returns under the target policy. However, we only have access to returns due to the behavior policy. To perform this “off-policy” procedure we can make use of the following:
\[ \large \begin{aligned} q_\pi(s,a) &= \mathbb E_\pi[G_t|S_t=s, A_t=a] \\ &= \mathbb E_b[\rho_{t:T-1}G_t|S_t=s, A_t=a] \end{aligned} \]
This allows us to simply scale or weight the returns under \(b\) to yield returns under \(\pi\).
In our current prediction problem, both the target and behavior policies are fixed.
5. Implementation
Figure 2 shows the algorithm for off-policy control for the estimation of the optimal policy function:

Next, we present the code that implements the algorithm.
env = BlackjackEnv()5.1 Policy
The following function captures the target policy used:
def create_random_policy(n_A):
A = np.ones(n_A, dtype=float)/n_A
def policy_function(observation):
return A
return policy_function #vector of action probabilitiesdef create_policy():
policy = defaultdict(int)
return policy5.2 Generate episodes
The following function sets the environment to a random initial state. It then enters a loop where each iteration applies the policy to the environment’s state to obtain the next action to be taken by the agent. That action is then applied to the environment to get the next state, and so on until the episode ends.
def generate_episode(env, policy):
episode = []
state = env.reset() #to a random state
while True:
probs = policy(state)
action = np.random.choice(np.arange(len(probs)), p=probs)
next_state, reward, done, _ = env.step(action) # St+1, Rt+1 OR s',r
episode.append((state, action, reward)) # St, At, Rt+1 OR s,a,r
if done:
break
state = next_state
return episode5.3 Main loop
The following function implements the main loop of the algorithm. It iterates for n_episodes. It also takes a list of monitored_state_actions for which it will record the evolution of action values. This is handy for showing how action values converge during the process.
def mc_control(env, n_episodes, discount_factor=1.0, monitored_state_actions=None, diag=False):
Q = defaultdict(lambda: np.zeros(env.action_space.n))
C = defaultdict(lambda: np.zeros(env.action_space.n))
pi = create_policy()
monitored_state_action_values = defaultdict(list)
for i in range(1, n_episodes + 1):
if i%1000 == 0: print("\rEpisode {}/{}".format(i, n_episodes), end=""); sys.stdout.flush()
b = create_random_policy(env.action_space.n)
episode = generate_episode(env, b); print(f'\nepisode {i}: {episode}') if diag else None
G = 0.0
W = 1.0
for t in range(len(episode))[::-1]:
St, At, Rtp1 = episode[t]
print(f"---t={t} St, At, Rt+1: {St, At, Rtp1}") if diag else None
G = discount_factor*G + Rtp1; print(f"G: {G}") if diag else None
C[St][At] += W; print(f"C[St][At]: {C[St][At]}") if diag else None #Weighted Importance Sampling (WIS) denominator
Q[St][At] += (W/C[St][At])*(G - Q[St][At]); print(f"Q[St][At]: {Q[St][At]}") if diag else None
pi[St] = np.argmax(Q[St]) #greedify pi, max_a Q[state][0], Q[state][1]
if At != np.argmax(pi[St]):
break
W = W*1.0/b(St)[At]; print(f"W: {W}, b(St)[At]: {b(St)[At]}") if diag else None
if monitored_state_actions:
for msa in monitored_state_actions:
s = msa[0]; a = msa[1]
# print("\rQ[{}]: {}".format(msa, Q[s][a]), end=""); sys.stdout.flush()
monitored_state_action_values[msa].append(Q[s][a])
print('\n++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++') if diag else None
print('++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++') if diag else None
print('\nmonitored_state_action_values:', monitored_state_action_values) if diag else None
return Q,pi,monitored_state_action_values 5.4 Monitored state-actions
Let’s pick a number of state-actions to monitor. Each tuple captures the player’s sum, the dealer’s showing card, and whether the player has a usable ace, as well as the action taken in the state:
monitored_state_actions=[((21, 7, False), 0), ((20, 7, True), 0), ((12, 7, False), 1), ((17, 7, True), 0)]Q,pi,monitored_state_action_values = mc_control(
env,
n_episodes=10,
monitored_state_actions=monitored_state_actions,
diag=True)
episode 1: [((15, 3, False), 1, 0), ((19, 3, False), 1, -1)]
---t=1 St, At, Rt+1: ((19, 3, False), 1, -1)
G: -1.0
C[St][At]: 1.0
Q[St][At]: -1.0
episode 2: [((18, 1, False), 0, -1)]
---t=0 St, At, Rt+1: ((18, 1, False), 0, -1)
G: -1.0
C[St][At]: 1.0
Q[St][At]: -1.0
W: 2.0, b(St)[At]: 0.5
episode 3: [((20, 10, False), 0, 1)]
---t=0 St, At, Rt+1: ((20, 10, False), 0, 1)
G: 1.0
C[St][At]: 1.0
Q[St][At]: 1.0
W: 2.0, b(St)[At]: 0.5
episode 4: [((20, 6, False), 0, 1)]
---t=0 St, At, Rt+1: ((20, 6, False), 0, 1)
G: 1.0
C[St][At]: 1.0
Q[St][At]: 1.0
W: 2.0, b(St)[At]: 0.5
episode 5: [((15, 3, True), 1, 0), ((15, 3, False), 0, -1)]
---t=1 St, At, Rt+1: ((15, 3, False), 0, -1)
G: -1.0
C[St][At]: 1.0
Q[St][At]: -1.0
W: 2.0, b(St)[At]: 0.5
---t=0 St, At, Rt+1: ((15, 3, True), 1, 0)
G: -1.0
C[St][At]: 2.0
Q[St][At]: -1.0
episode 6: [((13, 4, False), 0, 1)]
---t=0 St, At, Rt+1: ((13, 4, False), 0, 1)
G: 1.0
C[St][At]: 1.0
Q[St][At]: 1.0
W: 2.0, b(St)[At]: 0.5
episode 7: [((14, 9, False), 0, -1)]
---t=0 St, At, Rt+1: ((14, 9, False), 0, -1)
G: -1.0
C[St][At]: 1.0
Q[St][At]: -1.0
W: 2.0, b(St)[At]: 0.5
episode 8: [((17, 10, False), 1, -1)]
---t=0 St, At, Rt+1: ((17, 10, False), 1, -1)
G: -1.0
C[St][At]: 1.0
Q[St][At]: -1.0
episode 9: [((16, 7, False), 0, -1)]
---t=0 St, At, Rt+1: ((16, 7, False), 0, -1)
G: -1.0
C[St][At]: 1.0
Q[St][At]: -1.0
W: 2.0, b(St)[At]: 0.5
episode 10: [((20, 6, False), 1, 0), ((21, 6, False), 0, 0)]
---t=1 St, At, Rt+1: ((21, 6, False), 0, 0)
G: 0.0
C[St][At]: 1.0
Q[St][At]: 0.0
W: 2.0, b(St)[At]: 0.5
---t=0 St, At, Rt+1: ((20, 6, False), 1, 0)
G: 0.0
C[St][At]: 2.0
Q[St][At]: 0.0
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
"G_sum: defaultdict(<class 'float'>, {})"
"G_count: defaultdict(<class 'float'>, {})"
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
monitored_state_action_values: defaultdict(<class 'list'>, {((21, 7, False), 0): [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], ((20, 7, True), 0): [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], ((12, 7, False), 1): [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], ((17, 7, True), 0): [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]})Qdefaultdict(<function __main__.mc_control.<locals>.<lambda>>,
{(12, 7, False): array([0., 0.]),
(13, 4, False): array([1., 0.]),
(14, 9, False): array([-1., 0.]),
(15, 3, False): array([-1., 0.]),
(15, 3, True): array([ 0., -1.]),
(16, 7, False): array([-1., 0.]),
(17, 7, True): array([0., 0.]),
(17, 10, False): array([ 0., -1.]),
(18, 1, False): array([-1., 0.]),
(19, 3, False): array([ 0., -1.]),
(20, 6, False): array([1., 0.]),
(20, 7, True): array([0., 0.]),
(20, 10, False): array([1., 0.]),
(21, 6, False): array([0., 0.]),
(21, 7, False): array([0., 0.])})Q[(13, 5, False)]array([0., 0.])pidefaultdict(int,
{(13, 4, False): 0,
(14, 9, False): 1,
(15, 3, False): 1,
(15, 3, True): 0,
(16, 7, False): 1,
(17, 10, False): 0,
(18, 1, False): 1,
(19, 3, False): 0,
(20, 6, False): 0,
(20, 10, False): 0,
(21, 6, False): 0})pi[(18, 4, False)]0V = defaultdict(float)
for state, actions in Q.items():
action_value = np.max(actions)
V[state] = action_valueVdefaultdict(float,
{(12, 7, False): 0.0,
(13, 4, False): 1.0,
(13, 5, False): 0.0,
(14, 9, False): 0.0,
(15, 3, False): 0.0,
(15, 3, True): 0.0,
(16, 7, False): 0.0,
(17, 7, True): 0.0,
(17, 10, False): 0.0,
(18, 1, False): 0.0,
(19, 3, False): 0.0,
(20, 6, False): 1.0,
(20, 7, True): 0.0,
(20, 10, False): 1.0,
(21, 6, False): 0.0,
(21, 7, False): 0.0})print(monitored_state_actions[0])
print(monitored_state_action_values[monitored_state_actions[0]])((21, 7, False), 0)
[0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]#
# last value in monitored_state_actions should be value in Q
msa = monitored_state_actions[0]; print('msa:', msa)
s = msa[0]; print('s:', s)
a = msa[1]; print('a:', a)
monitored_state_action_values[msa][-1], Q[s][a] #monitored_stuff[msa] BUT Q[s][a]msa: ((21, 7, False), 0)
s: (21, 7, False)
a: 0(0.0, 0.0)5.5 Run 1
First, we will run the algorithm for 10,000 episodes, using policy1:
Q1,pi1,monitored_state_action_values1 = mc_control(
env,
n_episodes=10_000,
monitored_state_actions=monitored_state_actions,
diag=False)Episode 10000/10000#
# last value in monitored_state_actions should be value in Q
msa = monitored_state_actions[0]; print('msa:', msa)
s = msa[0]; print('s:', s)
a = msa[1]; print('a:', a)
monitored_state_action_values1[msa][-1], Q1[s][a] #monitored_stuff[msa] BUT Q[s][a]msa: ((21, 7, False), 0)
s: (21, 7, False)
a: 0(0.9210526315789471, 0.9210526315789471)The following chart shows how the values of the 4 monitored state-actions converge to their values:
plt.rcParams["figure.figsize"] = (18,10)
for msa in monitored_state_actions:
plt.plot(monitored_state_action_values1[msa])
plt.title('Estimated $q_\pi(s,a)$ for some state-actions', fontsize=18)
plt.xlabel('Episodes', fontsize=16)
plt.ylabel('Estimated $q_\pi(s,a)$', fontsize=16)
plt.legend(monitored_state_actions, fontsize=16)
plt.show()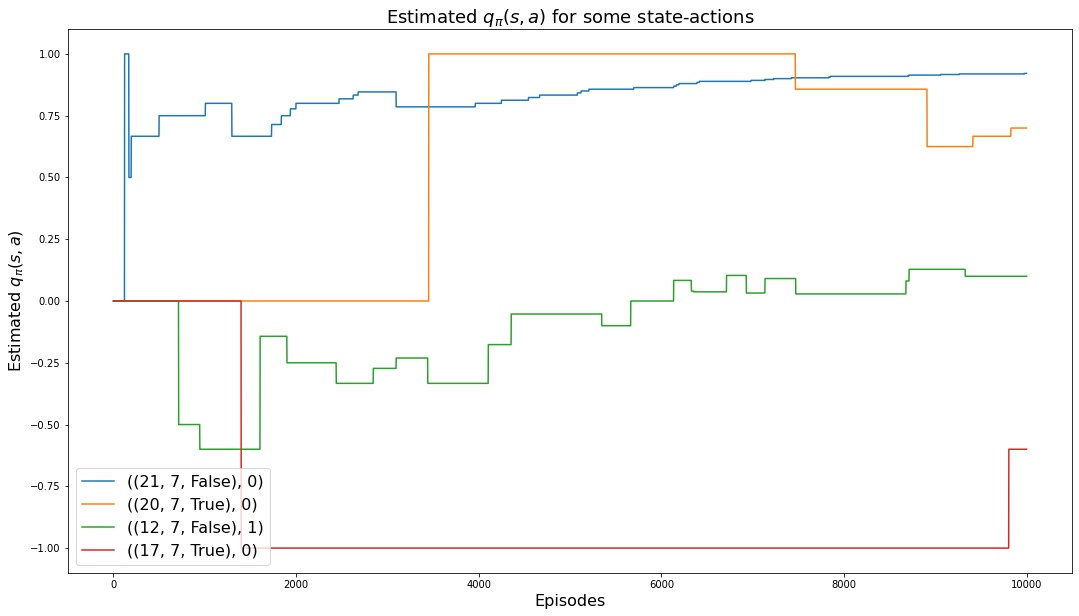
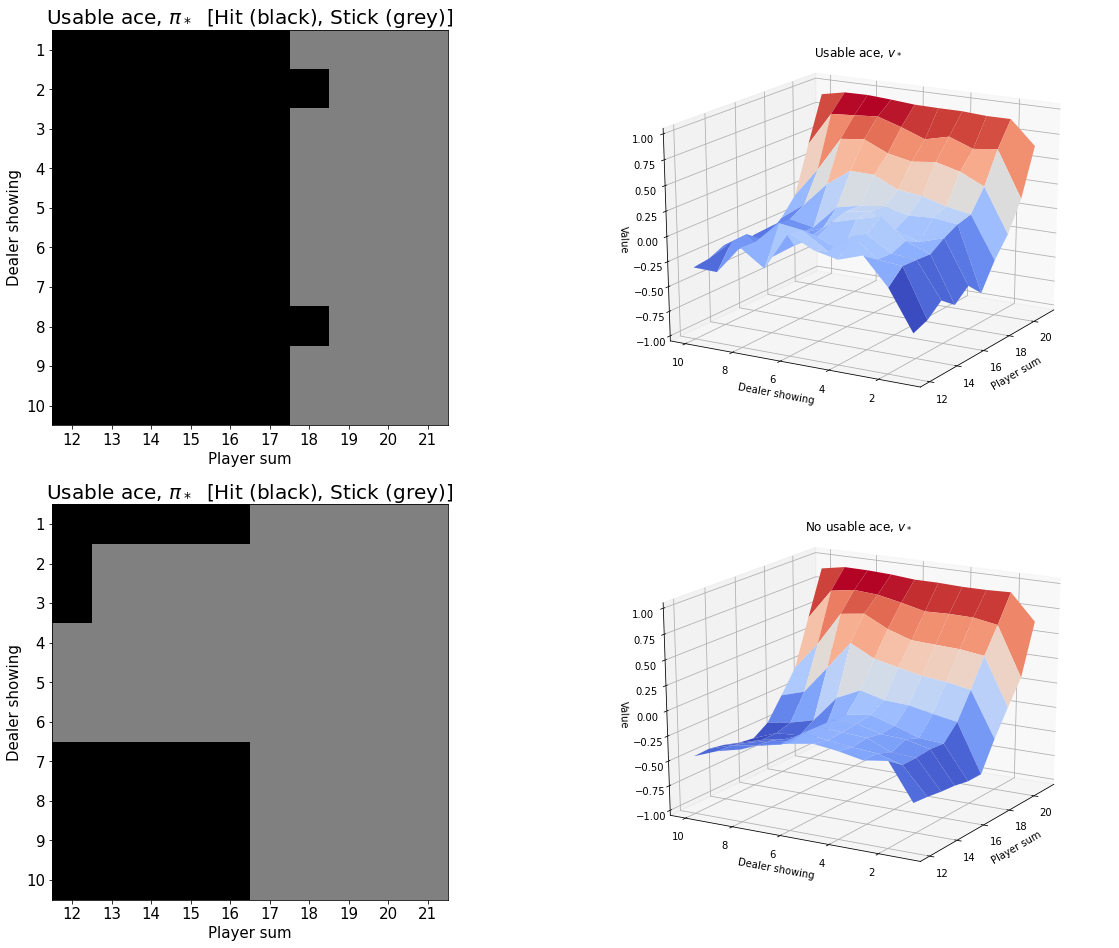
The following charts shows the estimate of the associated estimated optimal state-value function, \(v_*(s)\), for the cases of a usable ace as well as not a usable ace. First, we compute V1 which is the estimate for \(v_*(s)\):
V1 = defaultdict(float)
for state, actions in Q1.items():
action_value = np.max(actions)
V1[state] = action_valueAZIM = -110
ELEV = 20myplot.plot_pi_star_and_v_star(pi1, V1, title="$\pi_* and v_*$", wireframe=False, azim=AZIM-40, elev=ELEV);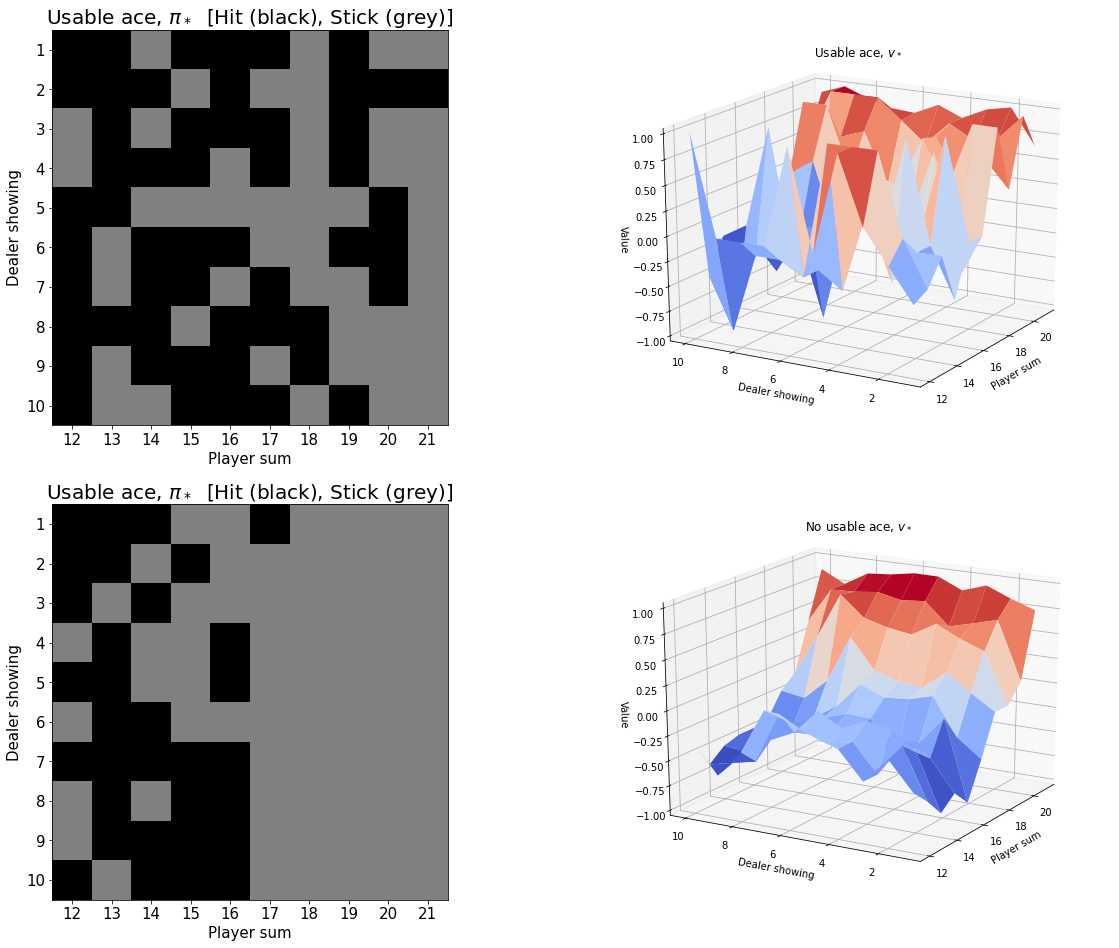
5.6 Run 2
Our final run uses 500,000 episodes and the accuracy of the action-value function is higher.
Q2,pi2,monitored_state_action_values2 = mc_control(
env,
n_episodes=500_000,
monitored_state_actions=monitored_state_actions,
diag=False)Episode 500000/500000#
# last value in monitored_state_actions should be value in Q
msa = monitored_state_actions[0]; print('msa:', msa)
s = msa[0]; print('s:', s)
a = msa[1]; print('a:', a)
monitored_state_action_values2[msa][-1], Q2[s][a] #monitored_stuff[msa] BUT Q[s][a]msa: ((21, 7, False), 0)
s: (21, 7, False)
a: 0(0.9206598586017273, 0.9206598586017273)plt.rcParams["figure.figsize"] = (18,12)
for msa in monitored_state_actions:
plt.plot(monitored_state_action_values2[msa])
plt.title('Estimated $q_\pi(s,a)$ for some state-actions', fontsize=18)
plt.xlabel('Episodes', fontsize=16)
plt.ylabel('Estimated $q_\pi(s,a)$', fontsize=16)
plt.legend(monitored_state_actions, fontsize=16)
plt.show()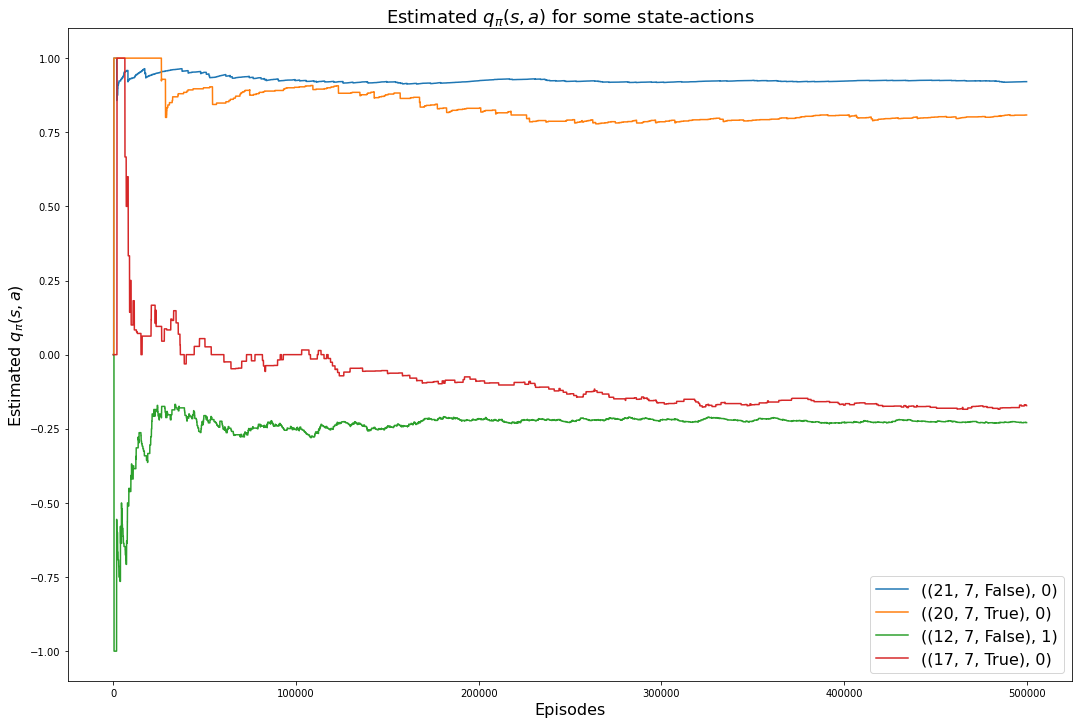
V2 = defaultdict(float)
for state, actions in Q2.items():
action_value = np.max(actions)
V2[state] = action_value# myplot.plot_action_value_function(Q2, title="500,000 Steps", wireframe=True, azim=AZIM, elev=ELEV)
myplot.plot_pi_star_and_v_star(pi2, V2, title="$\pi_* and v_*$", wireframe=False, azim=AZIM-40, elev=ELEV);